Projects
Each project is framed by the problem it solved, the action and tech stack I used, and the quantified result it delivered.

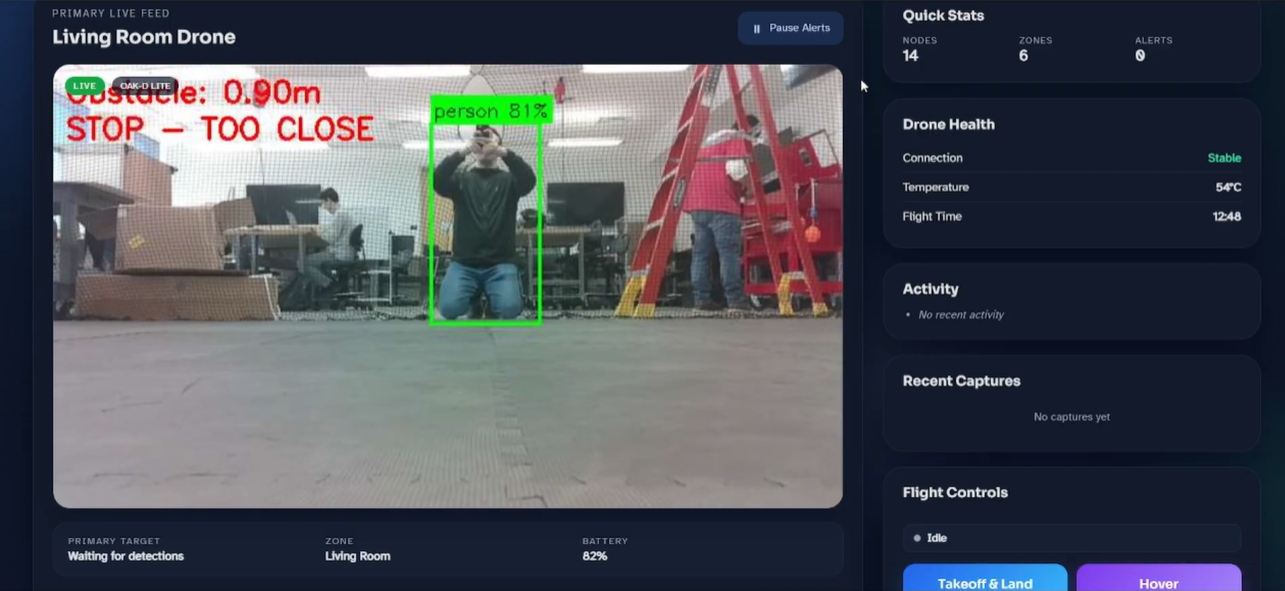
Indoor Autonomous Security Drone
Indoor environments lack affordable autonomous monitoring that can detect people and obstacles in real time without GPS.
Onboarded and calibrated a Raspberry Pi to interface with ESCs, a CubeOrange flight controller, and ArduPilot firmware. Integrated an OAK-D Lite depth camera for obstacle detection and built a live monitoring dashboard for flight controls.
Delivered a fully autonomous indoor drone with 81%+ person-detection accuracy and real-time obstacle avoidance — recognized as the Judges Choice Winner at Innovation Day.
Self-Balancing Robot
Embedded Systems Project
Maintaining upright balance on a two-wheel robot requires continuous correction against tilt, load, and disturbance.
Built the platform on a TM4C microcontroller with an L298N motor driver and IMU. Implemented a PID control loop and fused accelerometer and gyroscope data with a complementary filter.
Achieved stable, self-correcting balance under varying tilt and load conditions with smooth dynamic response.
IEEE 754 Floating-Point Adder
Digital Logic Design Project
Hardware arithmetic units must correctly handle floating-point edge cases that trip up naive implementations.
Designed a synthesizable IEEE 754 half-precision (16-bit) floating-point adder/subtractor in Verilog/SystemVerilog with full support for special cases.
Produced a verified unit handling zero, denormalized numbers, overflow, and underflow — ready for FPGA synthesis.
Data Centralization Dashboards
DoD Internship · JPEO-CBRND
Critical program data was fragmented across sources, slowing reporting and limiting decision-making visibility.
Developed applications and dashboards using SQL, Power BI, and Power Apps to centralize and visualize data, automating recurring report generation.
Improved data accessibility by 50%, reduced report generation time by 70%, and drove a 20% increase in operational efficiency.